Se connecter à EYESEE Cloud | Contacter l'assistance | Langue
Exécuter une mission
Pour revoir les étapes de mise en place d’EYESEE Drone et des EYESEE Tags dans votre allée, consultez l’article Positionner EYESEE Drone dans l’allée.
Durant un vol

 Mode pause pendant la mission.
Mode pause pendant la mission. Demande d’atterrissage avant la fin de la mission.
Demande d’atterrissage avant la fin de la mission. Pourcentage batterie du drone et temps de vol restant.
Pourcentage batterie du drone et temps de vol restant.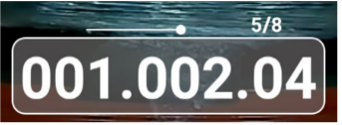 Code emplacement et barre d’avancement. Nombre d’étapes exécutées / Nombre d’étapes total.
Code emplacement et barre d’avancement. Nombre d’étapes exécutées / Nombre d’étapes total.
Durant le vol, en cas de réussite de lecture du code à barre

- Le code devient vert quand le code est lu
- Le code à barre lu apparait ici.
- Indique le nombre d’acquisitions obligatoires à lire / sur le nombre d’acquisitions lues
Durant le vol, en cas de non lecture d’un code sur un emplacement non vide
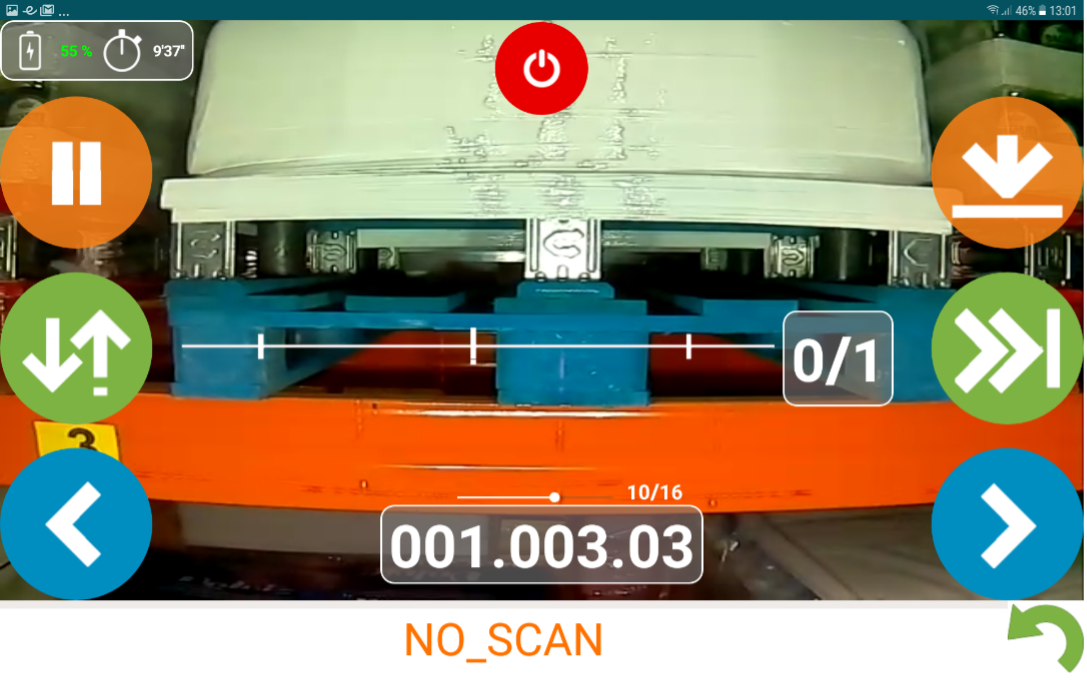
- Mode pause pendant la mission.
- Demande d’atterrissage avant la fin de la mission.
 Donner l’ordre de recommencer l’étape de vol.
Donner l’ordre de recommencer l’étape de vol. Valide la proposition du système et passe à l’étape suivante.
Valide la proposition du système et passe à l’étape suivante. Permet de déplacer le drone vers la gauche.
Permet de déplacer le drone vers la gauche. Permet de déplacer le drone vers la droite.
Permet de déplacer le drone vers la droite. Permet de basculer le choix du drone de NO_SCAN vers EMPTY ou de EMPTY vers NO_SCAN.
Permet de basculer le choix du drone de NO_SCAN vers EMPTY ou de EMPTY vers NO_SCAN.
Dans le cas d’une demande d’une « reprise de la mission », le drone commencera la lecture automatiquement à partir du premier code à barre non lu avant interuption de la mission et enchainera sur les codes à barres restants de la mission.
Les valeurs possibles sont :
- « NO_SCAN » : Quand l’emplacement n’est pas vide et que la lecture n’est pas possible (absence de l’étiquette, étiquette non lisible etc.).
- « EMPTY » : Si l’emplacement est vide.
Cas d’obstacle détecté sous le drone

- Permet de déplacer le drone vers la gauche.
- Permet de déplacer le drone vers la droite.
En cas de détection d’un obstacle sous le drone la mission est arrêtée et le drone reste en vol stationnaire.
La mission ne pourra pas être reprise sans un atterrissage du drone. Dans cette situation, la tablette vibre et émet des « bips » indiquant une situation anormale.
Il est de la responsabilité de l’opérateur de libérer la zone sous le drone ou de la décaler pour garantir la disponibilité de la zone d’atterrissage et de donner l’ordre d’atterrissage.